Oletko ikinä haaveillut herkkuvahdista, joka hälyttää, jos joku lähestyy aarteitasi? Sellainen on nimittäin helppo tehdä! No, oikeastihan herkkuja on kiva jakaa ja syödä muiden kanssa: jaettu ilo on kaksinkertainen ilo. Ehkä vahti voisi siis olla vaikka itseä varten. Ehkä haluat vähentää herkuilla mässäilyä, mutta kädet kulkeutuvat automaattisesti niitä kohti. Silloin herkkuvahti antaisi muistutuksen!
Herkkuvahti-projektissa opin, että projektia kannattaa lähteä rakentamaan vaihe vaiheelta. Jokaista osaa kannattaa testata erikseen, jotta näkee, missä mahdollinen vika on. Opin myös yhdistämään koodia, testasin ensimmäistä kertaa Arduino Nanoa ja liitin ensimmäisen kerran ulkoisen virtalähteen Arduinoon. Katsoin Herkkuvahtiin ohjeet pääosin Tero & Kimmo Karvisen kirjasta Sulautetut - Opi rakentamaan robotteja ja muita sulautettuja järjestelmiä. Olin todella innoissani, kun ystäväni halusi myydä kirjan minulle! Olin etsinyt kyseistä kirjaa kaikkialta, mutta se oli loppuunmyyty.
 |
| http://sulautetut.fi/img/cover-sulautetut.jpg |
Kirjassa neuvottiin, miten rakennetaan Väijyvahti. Se mittaa ultraäänisensorilla edessään olevaa etäisyyttä ja hälyttää värinällä, jos jokin tulee ultraäänisensoria liian lähelle. Kirjan Väijyvahdissa käytettiin tärinämoottoria, jota minulla ei ollut. Aloin pohtia, osaisinko käyttää sen tilalta summeria. Tutkailin netistä kummankin komponentin liittämistä koekytkentälevyyn. Kytkennät vaikuttivat samanlaisilta. Luin niistä esimerkiksi täältä ja täältä. Tiedän myös jo koodaamisesta jotakin, joten luotin siihen, että osaan kirjoittaa ja yhdistää koodit oikealla tavalla, vaikken kirjasta sanasta sanaan niitä kopioisikaan. Törmäsin muuten värinämoottoreita tutkiessani todella loistavaan Ihmevekotin- nettisivustoon, jossa myydään mm. erilaisia sensoreita ja muuta elektroniikkaa. Tuntui kuin olisin eksynyt lelukauppaan, koska siellä vaikutti olevan niin paljon kaikkea mielenkiintoista! Pitää tutustua sivustoon tarkemmin. Tai no enpä tutustukaan enempää, koska sitä selaillessani tekee mieli tilata sieltä kaikki! :|
Päätin käyttää tässä projektissa ensimmäisen kerran Arduino Nanoa; aiemmin olen käyttänyt Arduino Unoa. Luin, että Uno ja Nano toimivat käytännössä samalla tavalla, Nano on vain pienempi ja siinä on nähtävästi pari pinniä vähemmän. Mutta saman koodin pitäisi toimia niihin kumpaankin. Liitin Nanon suoraan koekytkentälevyyn, toisin kuin Unon. Täällä on vertailtu eri Arduino-malleja. Kirjan mukaan tarvitsin seuraavanlaiset varusteet:
Minulla ei ole leikkureita eikä johdonkuorintapihtejä, ja värinämoottorin tilalta käytin summeria. Alla minun varusteeni (johtoja tarvitsin enemmän kuin vain kuvassa olevat, ja paristokin puuttuu kuvasta):

Rakensin projektin seuraavalla tavalla:
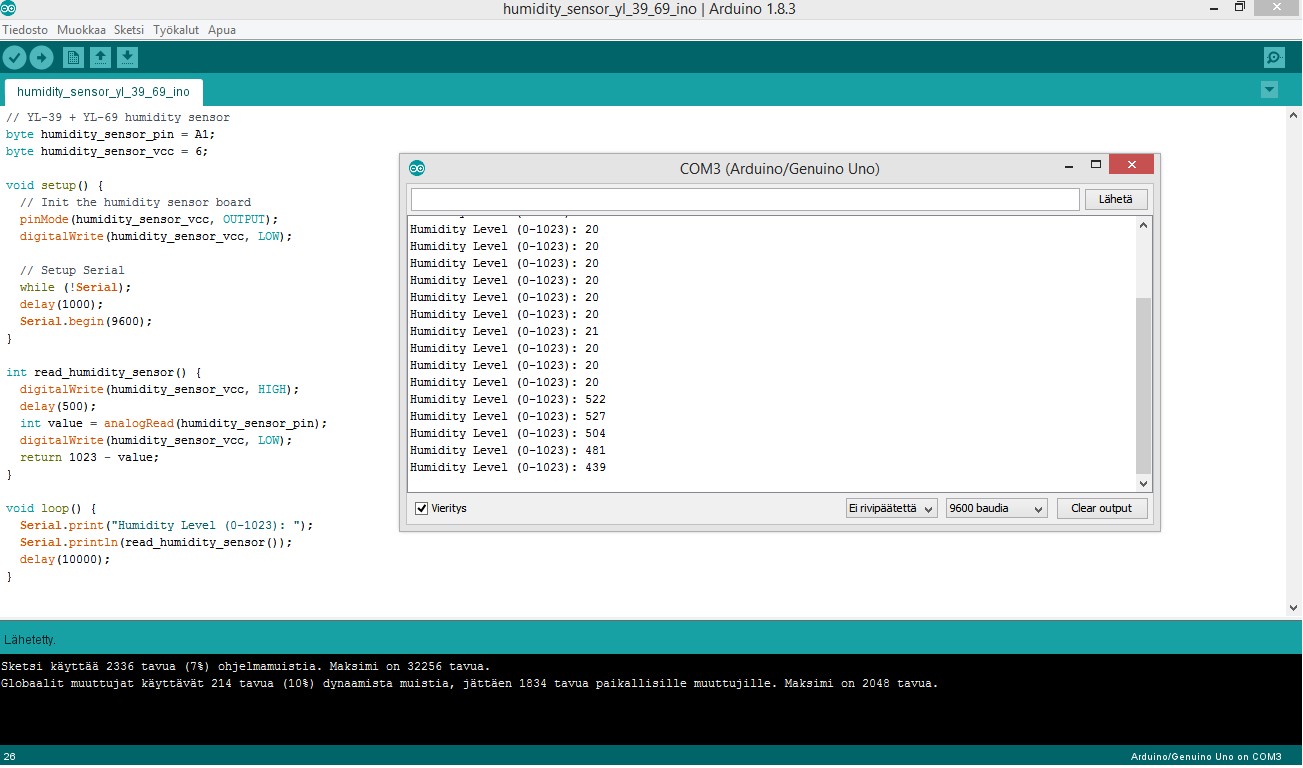
Yhdistin ultraäänisensorin ja summerin koodit muutoin Sulautetut-kirjan ohjeiden mukaan, mutta muuntelin sitä summerille sopivaksi. Yllätyin, että koodi toimi ensimmäisellä yrittämällä, kuten kaikki muukin tässä projektissa! Kuva lopullisesta, yhdistetystä koodista:

Liitin sopii Arduino Unon alustaan, mutta Nano oli kiinni koekytkentälevyssä, eikä Nanossa ollut liitoskohtaa nepparille. Huomasin Ihmevekotin.fi-sivulla myytävän halvalla paristoneppareita, joten päätin katkaista omasta nepparistani pään pois, jotta voisin liittää ne koekytkentälevyyn. Käytin tähän operaatioon saksia, koska minulla ei ole leikkureita. Hoksasin leikkaamisen jälkeen, että johdot pitää kuoriakin, jotta sähkö pääsee virtaamaan. Kokeilin mattoveistä, ja pienen urakoinnin jälkeen onnistuinkin! Mutta Charmmy Kitty vihkoni hieman kärsi, koska käytin sitä alustana. No, uhrauksia pitää välillä tehdä.

Nyt vain tungin johtojen päät koekytkentälevyn koloihin ja liitin toisen pään paristoon, joka tuli myös Arduino-pakettini mukana. Tältä lopputulos näytti!

Nyt viritelmääni voi liikuttaa vapaasti ilman, että tietokone roikkuu siinä kiinni. Tulen vielä jossain vaiheessa opettelemaan koteloiden tai muiden suojien kasaamista virityksilleni, jotta ne näyttäisivät nätimmiltä. Tadaa, nyt herkkuvahti on valmis! Se päivystää tässä sipsipussiani. Voisin myös laittaa summerin piippaamaan SOS-merkkiä aina, jos joku lähestyy soveltamalla koodiin aiemmin ledeille tekemääni SOS-koodia.

Olin todella innoissani ja inspiroitunut tehdessäni tätä projektia, koska olin iloinen siitä, että huomasin edistyneeni! En ollut enää epävarma otteissani, eikä koekytkentälevyn kanssa puuhailu tuntunut enää uudelta ja vieraalta asialta. Huomasin, että tekemällä oppii: osasin yhdistää aiemmissa projekteissani saavuttamaani tietoa tähän nykyiseen projektiin. Olen opetellut tietotekniikan opinnoissani koodausta, joten osasin myös jo hieman soveltaa koodia. Olen huomannut, että sekä tietotekniikan opinnoissani että näiden projektien rakentelussa opin ja minun kannattaa opetella ongelmanratkaisua, eikä pyrkiä osaamaan kaikkea ulkoa. Se taitaa olla melko itsestäänselvyys. Jos on jokin ongelma, miten sitä kannattaa lähteä ratkomaan? Mistä saan tietoa, jota tarvitsen esimerkiksi projektin tekemiseen? Jos osaan selvittää kysymyksiin / ongelmiin ratkaisut, kaikki on mahdollista! Olen huomannut, että olen melko hyvä etsimään tietoa. Hyödynnän ja yhdistelen monia eri kirjoja ja internetiä, ja toimin paljon myös intuitioni pohjalta kun etsin vastauksia. Pääsen myös helposti flow-tilaan. Ehtisinpä pian tehdä taas uuden projektin! Koulu vie käytännössä kaiken aikani työni kanssa, mutta se on sen arvoista.
_______________________________________________________________________
Ongelmakohtia, joita kohtasin, mutta jotka selvitin
- värinämoottorin korvaaminen summerilla
- koodien kirjoittaminen ja yhdistäminen värinämoottorin sijaan summerille
- koodien kirjoittaminen ja yhdistäminen Ping-sensorin sijaan HC-SR04-sensorille
- onko Arduino Unon ja Nanon koodeissa eroavaisuuksia
- kumpaa summeria käyttää, aktiivista vai passiivista?
- paristonepparin liittäminen koekytkentälevyyn
Mitä opin
- Käyttämään Arduino Nanoa
- Yhdistämään koodeja
- Projektin rakentamisen periaatteet - testaaminen vaihe vaiheelta
- Ulkoisen virtalähteen liittäminen Arduinoon
- Ultraäänisensori Pingin ja HC-SR04:n eroja
Projektissa käyttämäni tietolähteet
Päätin käyttää tässä projektissa ensimmäisen kerran Arduino Nanoa; aiemmin olen käyttänyt Arduino Unoa. Luin, että Uno ja Nano toimivat käytännössä samalla tavalla, Nano on vain pienempi ja siinä on nähtävästi pari pinniä vähemmän. Mutta saman koodin pitäisi toimia niihin kumpaankin. Liitin Nanon suoraan koekytkentälevyyn, toisin kuin Unon. Täällä on vertailtu eri Arduino-malleja. Kirjan mukaan tarvitsin seuraavanlaiset varusteet:
 |
| Kuva on kirjasta Sulautetut - Opi rakentamaan robotteja ja muita sulautettuja järjestelmiä. Tero karvinen & Kimmo Karvinen (2010). |
Minulla ei ole leikkureita eikä johdonkuorintapihtejä, ja värinämoottorin tilalta käytin summeria. Alla minun varusteeni (johtoja tarvitsin enemmän kuin vain kuvassa olevat, ja paristokin puuttuu kuvasta):

Rakensin projektin seuraavalla tavalla:
1. Testasin Arduinon toimivuuden
Ensin testasin, että Arduino toimii. Liitin sen tietokoneeseen usb-johdolla, avasin Arduino-sovelluksen ja latasin Arduinoon Blink-koodin. Sen pitäisi siis saada Arduinon sisäänrakennettu valo vilkkumaan. Aluksi se ei toiminut, mutta en ollut vain hoksannut valita oikeaa porttia. Jee, sain ladattua kaikki testaamani koodit arduinoon! Yksi testattavista on myös tekemäni SOS-koodi, eli Arduino vilkuttaa SOS-merkkiä. Mutta Blink tulee valmiina Arduino-sovelluksessa, ja senkin testaaminen riittää.
2. Ultraäänisensorin kytkeminen koekytkentälevyyn
Kirjan ohjeessa käytetään Ping-ultraäänisensoria, mutta minulla on vain HC-SR04-ultraäänisensori. Olin muistavinani, että Piillä olisi Ping-sensori, mutta sillä olikin joku ihan oma! Suloista <3 Kirjassa Make:Sensors -Projects and Experiments to Measure the World with Arduino and Raspberry Pi (Tero karvinen, Kimmo Karvinen & Ville Valtokari) on kerrottu Pingin ja HC-SR04-sensorin eroista. Erona on, että HC-SR04 käyttää erillisiä pinnejä äänen tuottamiseen ja kaiun mittaamiseen. Sen koodi eroaa siis hieman Ping-sensorin koodista. Luin sensorien eroista jo jossain aiemmassa projektissani, mutta olin jo unohtanut. Sulautetut-kirjassa on käytetty Ping-sensoria, joten otin projektiini koodin samojen tekijöiden Make: Sensors kirjasta. Toivoin, että koodi toimii Nanollakin, koska Make: Sensors kirjassa on käytetty puolestaan Unoa. Mutta luin, että saman kodin pitäisi toimia kummassakin, ja toimihan se. Koodit vaikuttivat kirjoissa myös hieman erilaisilta, muttei paljon. Ping ja HC-SR04 kytketään melkein samanlailla koekytkentälevyyn, mutta HC-SR04:ssa pitää otta huomioon se yksi ylimääräinen pinni. Alla on kuvat kytkentöjen eroista:
 |
| HC-SR04-sensorin kytkeminen koekytkentälevyyn ja Arduino Unoon. Kuva kirjasta Make:Sensors -Projects and Experiments to Measure the World with Arduino and Raspberry Pi.Tero karvinen, Kimmo Karvinen & Ville Valtokari(2014). |
 |
| Ping-sensorin kytkeminen koekytkentälevyyn ja Arduino Unoon. Kuva kirjasta Make:Sensors -Projects and Experiments to Measure the World with Arduino and Raspberry Pi.Tero karvinen, Kimmo Karvinen & Ville Valtokari(2014). |
Tältä valmis kytkentäni näytti!

Koodi ultraäänisensoriin on otettu siis samasta kirjasta kuin yläpuolella olevat kytkentäkuvat.

Koodi ultraäänisensoriin on otettu siis samasta kirjasta kuin yläpuolella olevat kytkentäkuvat.
 |
| Koodi kirjasta Make:Sensors -Projects and Experiments to Measure the World with Arduino and Raspberry Pi.Tero karvinen, Kimmo Karvinen & Ville Valtokari(2014). |
3. Summerin kytkeminen
Minulla oli sekä passiivinen että aktiivinen summeri, kumpaahan kannattaisi käyttää? Luin netistä, että aktiivinen summeri tuottaa ääntä itse, kun taas passiiviselle pitäisi itse lähettää äänisignaali. Päätin siis käyttää aktiivista. Mutta mitenhän erotan aktiivisen ja passiivisen summerin toisistaan tämän projektin jälkeen, koska ne kummatkin on merkitty alla olevassa kuvassa näkyvällä plussalla? Oletin, että passiivisessa summerissa olisi ollut miinus. Hetkinen, tätä kirjoittaessani hoksasin, että plus tarkoittaa positiivista jalkaa! Olin kytkentöjäni tehdessä pohtinut, kumpi on positiivinen ja kumpi negatiivinen jalka. Päädyin siihen, että jalat ovat varmaan samanlaiset kuin ledeissä, eli pitempi olisi positiivinen. Olihan se!

Summerin kytkeminen mietitytti, koska Väijyvahdin kuvissa, joissa oli käytetty tärinämoottoria, moottori oli kytketty johtojen avulla koekytkentälevyyn, kun taas minun summerissani oli vain jalat. Toinen, positiivinen, pää tulisi liittää Arduinon pinniin ja toinen , negatiivinen, Groundiin sekä värinämoottorin että summerin tapauksessa. Olisi hankala liittää summeri vain jalkojen avulla kokeytkentälevyyn: en olisi saanut venytettyä sitä niin, että toinen jalka osuisi samalla riville Arduinon GND:n kanssa ja toinen pinnin kanssa. Mutta onneksi muistin toimineeni aiemmassa projektissani niin, että kytkin komponentin uros-ja naarasjohtojen janalla kiinni komponenttiin tai koekytkentälevyyn. En tosin tiedä miten järkevää se on, mutta se toimi myös summerin kohdalla! Tältä kytkentäni näytti.


Summerin kytkeminen mietitytti, koska Väijyvahdin kuvissa, joissa oli käytetty tärinämoottoria, moottori oli kytketty johtojen avulla koekytkentälevyyn, kun taas minun summerissani oli vain jalat. Toinen, positiivinen, pää tulisi liittää Arduinon pinniin ja toinen , negatiivinen, Groundiin sekä värinämoottorin että summerin tapauksessa. Olisi hankala liittää summeri vain jalkojen avulla kokeytkentälevyyn: en olisi saanut venytettyä sitä niin, että toinen jalka osuisi samalla riville Arduinon GND:n kanssa ja toinen pinnin kanssa. Mutta onneksi muistin toimineeni aiemmassa projektissani niin, että kytkin komponentin uros-ja naarasjohtojen janalla kiinni komponenttiin tai koekytkentälevyyn. En tosin tiedä miten järkevää se on, mutta se toimi myös summerin kohdalla! Tältä kytkentäni näytti.


4. Koodien yhdistäminen
 |
| Koodi on mukailtu kirjan Sulautetut - Opi rakentamaan robotteja ja muita sulautettuja järjestelmiä. Tero Karvinen & Kimmo karvinen (2010) ohjeen mukaan. |
5. Pariston liittäminen
Halusin luomukseni toimivan myös ilman usb-kaapelia, jotta sitä voisi siirrellä vapaasti. Sulautetut-kirjan ohjeiden mukaan siihen tarvitsisi vain paristonepparin, joka minulla oliki tullut Arduino-paketin mukana. Ongelmana vain oli, että paristonepparissa oli päässä tällainen liitin:
Liitin sopii Arduino Unon alustaan, mutta Nano oli kiinni koekytkentälevyssä, eikä Nanossa ollut liitoskohtaa nepparille. Huomasin Ihmevekotin.fi-sivulla myytävän halvalla paristoneppareita, joten päätin katkaista omasta nepparistani pään pois, jotta voisin liittää ne koekytkentälevyyn. Käytin tähän operaatioon saksia, koska minulla ei ole leikkureita. Hoksasin leikkaamisen jälkeen, että johdot pitää kuoriakin, jotta sähkö pääsee virtaamaan. Kokeilin mattoveistä, ja pienen urakoinnin jälkeen onnistuinkin! Mutta Charmmy Kitty vihkoni hieman kärsi, koska käytin sitä alustana. No, uhrauksia pitää välillä tehdä.

Nyt vain tungin johtojen päät koekytkentälevyn koloihin ja liitin toisen pään paristoon, joka tuli myös Arduino-pakettini mukana. Tältä lopputulos näytti!

Nyt viritelmääni voi liikuttaa vapaasti ilman, että tietokone roikkuu siinä kiinni. Tulen vielä jossain vaiheessa opettelemaan koteloiden tai muiden suojien kasaamista virityksilleni, jotta ne näyttäisivät nätimmiltä. Tadaa, nyt herkkuvahti on valmis! Se päivystää tässä sipsipussiani. Voisin myös laittaa summerin piippaamaan SOS-merkkiä aina, jos joku lähestyy soveltamalla koodiin aiemmin ledeille tekemääni SOS-koodia.

Olin todella innoissani ja inspiroitunut tehdessäni tätä projektia, koska olin iloinen siitä, että huomasin edistyneeni! En ollut enää epävarma otteissani, eikä koekytkentälevyn kanssa puuhailu tuntunut enää uudelta ja vieraalta asialta. Huomasin, että tekemällä oppii: osasin yhdistää aiemmissa projekteissani saavuttamaani tietoa tähän nykyiseen projektiin. Olen opetellut tietotekniikan opinnoissani koodausta, joten osasin myös jo hieman soveltaa koodia. Olen huomannut, että sekä tietotekniikan opinnoissani että näiden projektien rakentelussa opin ja minun kannattaa opetella ongelmanratkaisua, eikä pyrkiä osaamaan kaikkea ulkoa. Se taitaa olla melko itsestäänselvyys. Jos on jokin ongelma, miten sitä kannattaa lähteä ratkomaan? Mistä saan tietoa, jota tarvitsen esimerkiksi projektin tekemiseen? Jos osaan selvittää kysymyksiin / ongelmiin ratkaisut, kaikki on mahdollista! Olen huomannut, että olen melko hyvä etsimään tietoa. Hyödynnän ja yhdistelen monia eri kirjoja ja internetiä, ja toimin paljon myös intuitioni pohjalta kun etsin vastauksia. Pääsen myös helposti flow-tilaan. Ehtisinpä pian tehdä taas uuden projektin! Koulu vie käytännössä kaiken aikani työni kanssa, mutta se on sen arvoista.
_______________________________________________________________________
Projekti herkkuvahti - yhteenveto:
Ongelmakohtia, joita kohtasin, mutta jotka selvitin
- värinämoottorin korvaaminen summerilla
- koodien kirjoittaminen ja yhdistäminen värinämoottorin sijaan summerille
- koodien kirjoittaminen ja yhdistäminen Ping-sensorin sijaan HC-SR04-sensorille
- onko Arduino Unon ja Nanon koodeissa eroavaisuuksia
- kumpaa summeria käyttää, aktiivista vai passiivista?
- paristonepparin liittäminen koekytkentälevyyn
Mitä opin
- Käyttämään Arduino Nanoa
- Yhdistämään koodeja
- Projektin rakentamisen periaatteet - testaaminen vaihe vaiheelta
- Ulkoisen virtalähteen liittäminen Arduinoon
- Ultraäänisensori Pingin ja HC-SR04:n eroja
Projektissa käyttämäni tietolähteet
- Sulautetut - Opi rakentamaan robotteja ja muita sulautettuja järjestelmiä. Tero Karvinen & Kimmo karvinen (2010).
- Make: Sensors. Projects and Experiments to measure the World with Arduino and Raspberry Pi. Tero karvinen, Kimmo Karvinen & Ville Valtokari (2014).
- https://forum.arduino.cc/index.php?topic=129741.0